Kitchen utensil corpora for robotic-oriented tasks
A new version of this dataset can be found at this link.
This corpora contains 4 collections of images of kitchen utensils devised for research on domain adaptation techniques, being three of them elaborated by the authors and the third obtained from https://homepages.inf.ed.ac.uk/rbf/UTENSILS/.
All corpora comprise color images of kitchen utensils classified into 12 possible classes and with a spatial resolution of 64x64 pixels. It is important to note that these collections were prepared to contain different characteristics, but with realistic domain shift variations that represent real cases in robotic tasks. Below, a comprehensive description of these four corpora is provided:
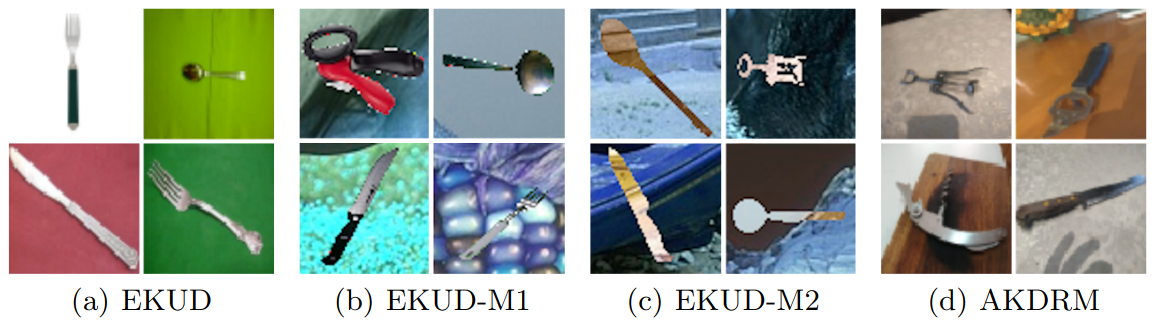
- Edinburgh Kitchen Utensil Database (EKUD): Dataset which comprises 897 color images of 12 kitchen utensils (about 75 images per class) created to train domestic assistance robots. These are real-world pictures of utensils with uniform backgrounds.
- EKUD-M Real Color (EKUD-M1): Corpus generated by the authors combining images of EKUD with patches from BSDS5000, following an approach similar to that used to develop the MNIST-M collection. In this case, only the background of the EKUD images was modified, keeping the original color of the objects.
- EKUD-M Not Real Color (EKUD-M2): Extension to EKUD-M1 in which the color of the objects was altered by being mixed with the color of the patches used for the background.
- Alicante Kitchenware Dataset for Robotic Manipulation (AKDRM): Collection developed by the authors by manually taking 1,480 photographs of the same 12 kitchen utensils contained in EKUD (about 123 images per class in this case). It contains real and varied backgrounds, different lighting levels, and considering different perspectives for the images.
Some examples of each dataset are shown in the figure below:
RELATED PUBLICATION (CITATION)
Please, if you use these datasets or part of them, cite the following publication:
@inproceedings{Saez2022,
author = {Javier Sáez-Pérez, Antonio Javier Gallego, Jose J. Valero-Mas, and Jorge Calvo-Zaragoza},
title = {Domain Adaptation in Robotics: A Study Case on Kitchen Utensil Recognition},
booktitle = {Iberian Conference on Pattern Recognition and Image Analysis},
year = {2022}
}
DOWNLOAD
To download this dataset use the following link:
This work was supported by the project I+D+i PID2020-118447RA-I00 (MultiScore), funded by MCIN/AEI/10.13039/501100011033, and the Generalitat Valenciana through project GV/2021/064. The third author is supported by grant APOSTD/2020/256 from "Programa I+D+i de la Generalitat Valenciana".